Contactile - Robotic Gripper Accessory
During my internship at Contactile, I designed a device that controls and supplies power to a robotic gripper. The purpose of this device was to enable mobile demonstration of the gipper for trade shows and conferences.
I designed this 4-layer PCB in KiCad:
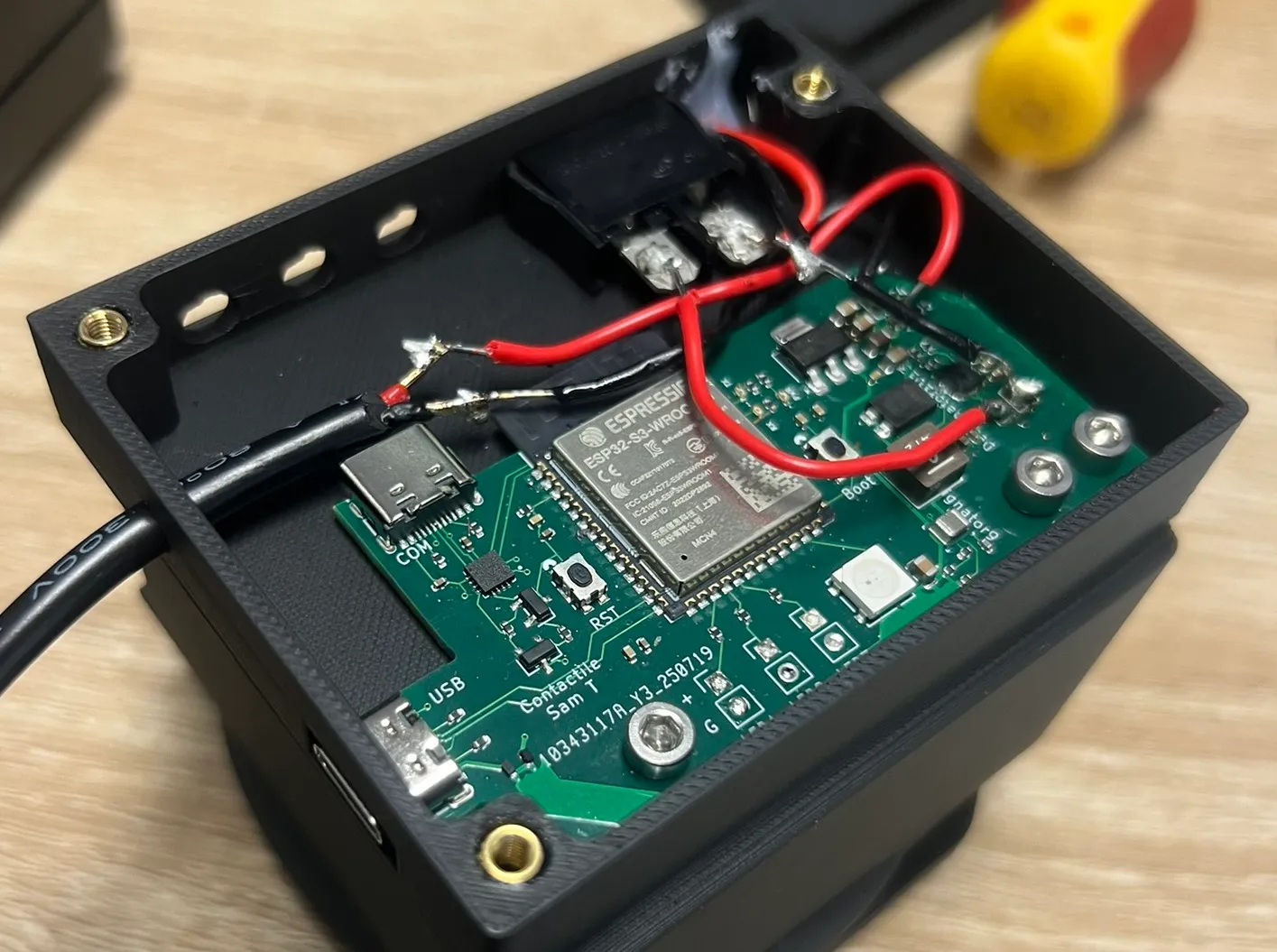
Figure: The PCB
The PCB was manufactured by JLCPCB, and the first iteration worked as expected. The MCU is an ESP32-S3 WROOM and ESP-IDF was used to program the USB and BLE peripherals.
The power supply consists of eight (high current) AA rechargeable batteries. A boost converter was designed to step up the ~12V supply voltage to 24V for the gripper and a buck converter was used to step voltage down to 5V for the digital circuit.
I used Autodesk Fusion to design the mechancial housing and a Bambu 3D printer for prototyping.
During the project, I used oscilloscopes, logic analysers, multimeters, and current probes for electrical prototyping and troubleshooting. I also used SMT and soldering equipment for surface-mount and through-hole connections.